






























{kind=link}
Ռոբոտների մեծամասնությունը ձեռք է բերում բռնող և շոշափելի զգայություն շարժիչային միջոցների միջոցով, որոնք կարող են լինել չափազանց մեծ և կոշտ: Քորնելի համալսարանի խումբը մշակել է մի միջոց, որպեսզի փափուկ ռոբոտը ներքուստ զգա իր շրջապատը, մոտավորապես նույն կերպ, ինչպես մարդիկ:
Մի խումբ՝ մեխանիկական և օդատիեզերական ճարտարագիտության ասիստենտ Ռոբերտ Շեփերդի գլխավորությամբ և գլխավոր քննիչ Օրգանական ռոբոտաշինության լաբորատորիա, հրապարակել է մի փաստաթուղթ, որտեղ նկարագրված է, թե ինչպես են ձգվող օպտիկական ալիքատարները փափուկ ռոբոտ ձեռքի մեջ գործում են որպես կորության, երկարացման և ուժի սենսորներ:
Դոկտորանտ Հուիչան Ժաոն «Ձգվող օպտիկական ալիքատարների միջոցով օպտոէլեկտրոնիկորեն ներարկված փափուկ պրոթեզային ձեռքը», որը ներկայացված է Science Robotics-ի դեբյուտային հրատարակության մեջ: Թերթը հրապարակվել է դեկտեմբերի 6-ին; Աջակցում էին նաև դոկտորանտներ Քևին Օ'Բրայենը և Շուո Լին, երկուսն էլ Շեփերդի լաբորատորիայից:
«Ռոբոտների մեծ մասն այսօր մարմնի արտաքին մասում ունի սենսորներ, որոնք հայտնաբերում են իրերը մակերեսից», - ասաց Չժաոն: «Մեր սենսորները ինտեգրված են մարմնի ներսում, այնպես որ նրանք կարող են իրականում հայտնաբերել ուժերը, որոնք փոխանցվում են ռոբոտի հաստությամբ, ինչպես մենք և բոլոր օրգանիզմները, օրինակ, երբ ցավ ենք զգում»:
Օպտիկական ալիքատարները օգտագործվել են 1970-ականների սկզբից բազմաթիվ զգայական գործառույթների համար, ներառյալ շոշափելի, դիրքային և ակուստիկ: Ստեղծումն ի սկզբանե բարդ գործընթաց էր, սակայն փափուկ լիտոգրաֆիայի և 20-D տպագրության վերջին 3 տարիների գալուստը հանգեցրեց էլաստոմերային սենսորների զարգացմանը, որոնք հեշտությամբ արտադրվում և ընդգրկվում են փափուկ ռոբոտային հավելվածում:
Shepherd-ի խումբը կիրառել է չորս քայլ փափուկ լիտոգրաֆիայի պրոցես՝ արտադրելու միջուկը (որի միջոցով լույսը տարածվում է) և ծածկույթը (ալիքատարի արտաքին մակերեսը), որտեղ նույնպես գտնվում են LED-ը (լուսարձակող դիոդ) և ֆոտոդիոդը:
Որքան շատ է դեֆորմացվում ձեռքի պրոթեզը, այնքան ավելի շատ լույս է կորչում միջուկի միջով: Լույսի այդ փոփոխական կորուստը, ինչպես հայտնաբերվում է ֆոտոդիոդի կողմից, այն է, ինչը թույլ է տալիս պրոթեզին «զգալ» իր շրջապատը:
«Եթե պրոթեզը թեքելիս լույսը չկորչի, մենք ոչ մի տեղեկություն չէինք ստանա սենսորի վիճակի մասին», - ասաց Շեփերդը: «Կորստի չափը կախված է նրանից, թե ինչպես է այն թեքվել»:
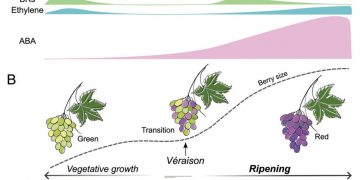
Խումբն օգտագործել է իր օպտոէլեկտրոնային պրոթեզը մի շարք առաջադրանքներ կատարելու համար, այդ թվում՝ բռնել և զոնդավորել ինչպես ձևի, այնպես էլ հյուսվածքի համար: Հատկանշական է, որ ձեռքը կարողացավ սկանավորել երեք լոլիկ և պարզել, թե որն է ամենահասունը:
Չժաոն ասաց, որ այս տեխնոլոգիան ունի բազմաթիվ պոտենցիալ կիրառումներ, բացի պրոթեզներից, ներառյալ կենսաներշնչված ռոբոտները, որոնք Shepherd-ի հետ միասին ուսումնասիրել է: Մեյսոն Պեկ, մեխանիկական և օդատիեզերական ճարտարագիտության դոցենտ, տիեզերական հետազոտության մեջ օգտագործելու համար.
«Այդ նախագիծը զգայական հետադարձ կապ չունի», - ասաց Շեփերդը, նկատի ունենալով Պեկի հետ համագործակցությունը, «սակայն եթե մենք ունենայինք սենսորներ, մենք կարող էինք իրական ժամանակում հետևել այրման ժամանակ ձևի փոփոխությանը [ջրի էլեկտրոլիզի միջոցով] և մշակել ավելի լավ գործարկման հաջորդականություններ՝ ստեղծելու համար: այն ավելի արագ է շարժվում»:
Փափուկ ռոբոտաշինության օպտիկական ալիքատարների վրա ապագա աշխատանքը կկենտրոնանա սենսորային հնարավորությունների ավելացման վրա՝ մասամբ 3-D տպագրության միջոցով ավելի բարդ սենսորային ձևեր և ներառելով մեքենայական ուսուցում՝ որպես ազդանշանների մեծ թվով սենսորներից անջատելու միջոց: «Հենց հիմա,- ասաց Շեփերդը,- դժվար է տեղայնացնել, թե որտեղից է գալիս հպումը»:
Այս աշխատանքը աջակցվել է ռազմաօդային ուժերի Գիտական հետազոտությունների գրասենյակի դրամաշնորհով և օգտագործվել է Cornell NanoScale գիտության և տեխնոլոգիայի հաստատություն եւ Cornell նյութերի հետազոտման կենտրոն, որոնք երկուսն էլ աջակցվում են Ազգային գիտական հիմնադրամի կողմից։
- Թոմ Ֆլեյշման, Կոռնելի համալսարան